Skip to main content
Link
Search
Menu
Expand
Document
(external link)
Home
🎯 news
🤓 about
⚙️ how does it work?
💡 features
📷 gallery
🛠️ do it yourself!
🗺️ overview & tips
🧵 3D printing
⚡ electronics
📝 bill of materials
💻 firmware
🧩 assembly
0. harnesses
1. NEMA
3. PCB
3. chassis
4. press
5. feed
6. daisy wheel
7. top
8. feeder
9. finish
📶 connection
➰ label reel
⏱️ calibration
🧬 iterations
🚀 roadmap
22oct - calibration setup
22oct - design inspo. & UI
22oct - device GUI
22sep - improved structure
22sep - PCB v0.9 assembly
22jul - PCB version 0.9
22jul - working on PCB
22may - optimization & docs
21oct - consist. & usability
21jun - embossing proof
21mar - data transfer
21mar - first experiments
⚖️ license
🏅 credits
📚 libraries
🙂 thanks
📺 media
😍 donate
HACKADAY
GitHub
OSHWA
andrei.cc
🧬 iterations
21mar - first experiments
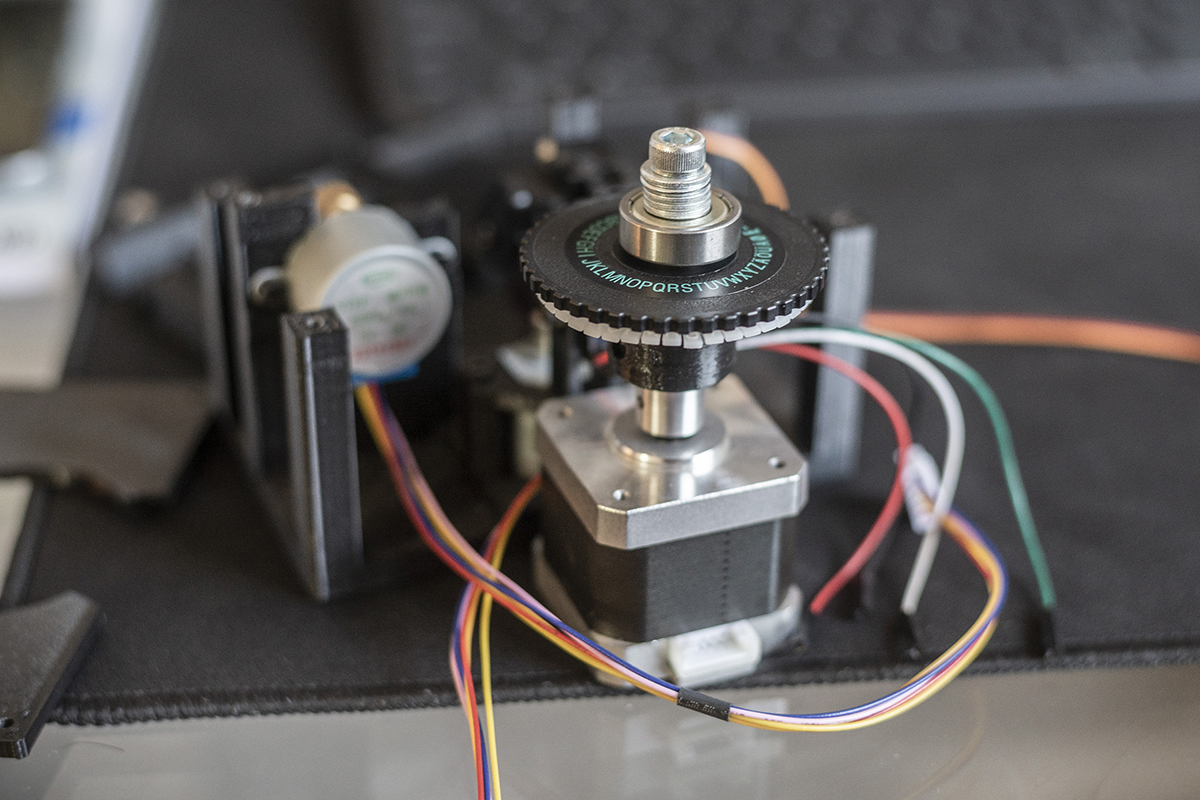
first experiments
/ March, 2021
Using Arduino mega, communication via serial.
Daisy wheel homing with infrared sensor + one missing “tooth” led to inconsistent results and misalignment.
Tested with a SG-90 servo, but it was too weak to press the tape.